As the global logistics industry transitions toward Level 4 (L4) autonomy, the traditional security perimeter—once defined by physical padlocks and GPS geofencing—is being fundamentally redefined. The core of the autonomous “AI Brain” is its perception layer, primarily driven by Light Detection and Ranging (LiDAR). However, technical research has revealed a sophisticated class of “soft-kill” vulnerabilities that allow for the remote manipulation of an autonomous vehicle’s reality. Chief among these is the Adaptive High-Frequency Removal (A-HFR) attack, a methodology that can “erase” objects from a truck’s point cloud at highway speeds.
The Mechanism: Overriding the Point Cloud
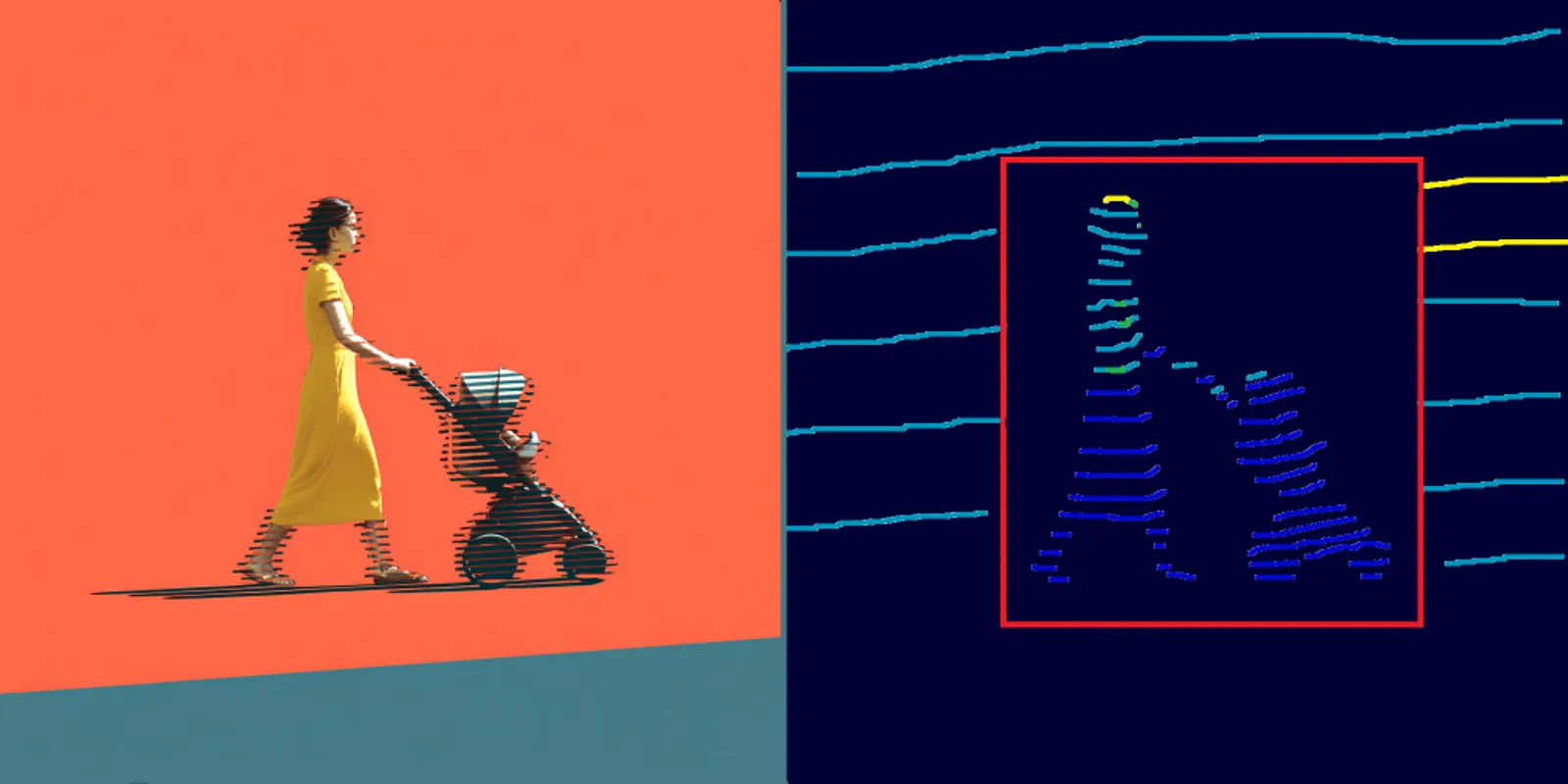
A LiDAR sensor operates by emitting laser pulses and measuring the Time-of-Flight (ToF) for those pulses to return after hitting an object. By doing this millions of times per second, the vehicle constructs a 3D Point Cloud—a digital twin of its immediate environment.
A spoofing attack compromises this process at the physical layer. By projecting malicious laser signals into the LiDAR’s receiver, an adversary can “overwrite” legitimate distance measurements. In an object injection attack, the spoofer sends a signal that arrives earlier than the real reflection, tricking the AI into “seeing” a phantom wall or pedestrian. Conversely, in an object removal attack, the spoofer floods the sensor with high-frequency light that causes the system to reject the legitimate data, effectively making solid objects invisible to the vehicle’s navigation stack.
The “Signal Cannon”: Off-the-Shelf Sabotage Perhaps the most alarming aspect for shippers is the accessibility of the hardware required to execute such an attack. A seminal study presented at the Network and Distributed System Security (NDSS) Symposium in 2025 demonstrated that a Moving Vehicle Spoofing (MVS) system can be assembled for approximately $2,300, using components readily available from electronics hobbyist retailers.
The architecture of this MVS rig consists of three core subsystems:
-
Detection and Tracking: Attackers use an Infrared (IR) camera equipped with a 905 nm bandpass filter (specifically the Thorlabs FBH905-10). Because most industrial LiDAR - such as the Velodyne VLP-32c used in the study’s baseline tests - operates at a 905 nm wavelength, the camera sees the truck’s sensors as brilliant beacons, allowing for tracking at distances up to 110 meters (360.9ft).
-
The Optical Receiver: To sniff the truck’s pulses from a distance, the system utilizes a vertical parabolic mirror antenna with a height of 600 mm. This antenna concentrates sparse, radial laser light onto a high-speed photodiode (PD) paired with a Trans-Impedance Amplifier (TIA).
-
The Laser Driver: This is the “emitter” that fires back at the truck. Using a high-precision servo motor (the Dynamixel MX-28) with a turning table, the system can maintain a lock on a vehicle moving at 60 km/h (37.3 mph) with surgical precision.
Bypassing Pulse Fingerprinting
To defend against interference, modern LiDAR manufacturers, including Hesai and Livox, have implemented Pulse Fingerprinting. This is an authentication layer where the sensor emits pairs of pulses with a randomized, secret interval. If a reflected pulse doesn’t match this secret interval, the vehicle’s computer ignores it as noise. The NDSS 2025 study specifically tested the A-HFR attack against the Hesai AT128, Hesai XT32, and the Livox Horizon.
The A-HFR (Adaptive High-Frequency Removal) attack is specifically designed to defeat this “lock.” While traditional spoofing might fire a pulse at a static frequency, A-HFR leverages “gray-box” knowledge of the sensor’s rotation to blast a “wall of light” at 25 MHz only when the sensor is looking at the target object.
By saturating the receiver at such high frequencies, the attacker ensures that, mathematically, a portion of the malicious pulses will fall within the sensor’s ‘acceptance window’ for authentication. The NDSS 2025 researchers found that this ‘Adaptive’ approach overcomes the primary hurdle of previous attacks: overheating. By resting the laser diode when the truck isn’t looking, the rig can maintain the high-power output necessary to overpower legitimate signals. During experimental trials, this attack proved most lethal against production-grade sensors like the Hesai AT128 and XT32, as well as the Livox Horizon, achieving a 96% to 100% point removal rate at speeds of 60 km/h (37.3 mph). This is not a software hack; it is a brute-force exploit of the physics of light that effectively renders the vehicle’s primary safety sensors blind to obstacles.
Quantifiable Risk: The 20-Meter Danger ZoneFor a transportation manager or a 3PL provider, the metrics are stark. The A-HFR attack has been demonstrated to remain effective until the vehicle is within 20 meters of the target. This is a critical threshold because, at 60 km/h (37.3 mph), 20m (65.6ft) is roughly the braking distance of a heavy-duty tractor-trailer. If an attacker “erases” a concrete barrier or a stalled vehicle from the point cloud, the vehicle will not engage its emergency braking system until it is physically impossible to avoid a collision. This creates a catastrophic failure in SOTIF (Safety of the Intended Functionality), where the system is performing exactly as programmed but is making life-and-death decisions based on a corrupted reality.
The Shipper’s Strategic Response
The implications for liability and cargo security are profound. Shippers must understand that “Cyber Insurance” may not cover losses resulting from physical-layer sensor sabotage. As the industry moves toward automated logistics, the responsibility for verifying the “truth” of a sensor’s data becomes a major operational hurdle.
This style of “Physical-Layer Sabotage” is particularly dangerous because it bypasses the encrypted handshakes that protect the digital network. By the time the data reaches the “AI Brain,” the lie has already been authenticated.
The Resilience Checklist: Evaluating Your L4 Partners
To ensure your fleet or service provider is prepared for physical-layer vulnerabilities without placing unrealistic demands on vendors, look for these three realistic security benchmarks:
-
Multi-Modal “Veto” Logic: Ask if the system uses “Resilient Sensor Fusion.” In this setup, if a Radar or Ultrasonic sensor detects a mass but the LiDAR reports “clear,” the system should default to a “Cautionary Crawl” or “Safe Stop” rather than prioritizing the LiDAR. This prevents a single-point failure in the 905 nm spectrum.
-
Enhanced Pulse Randomization: Vendors should be encouraged to maximize the “entropy” or complexity of their pulse fingerprinting. While A-HFR can bypass current intervals, increasing the randomness and shortening the “tolerance error” window significantly increases the hardware cost and complexity required for an attacker to succeed.
-
Physical Consistency Checks (Occupancy Grids): Does the software check for “Shadowing”? A real object in the road blocks the view of things behind it. If the LiDAR sees the background through a space where another sensor (like a camera) sees an object, it should trigger an immediate “Perception Alert.”
Conclusion: The Future of Autonomous Security
The A-HFR research serves as a sobering reminder that an autonomous “AI Brain” is only as reliable as the inputs it receives. For the shipping industry, the lesson is clear: while we must remain vigilant against traditional software bugs and network-based hacking, we must also recognize the vulnerability inherent in the perception layer. A $2,300 device capable of editing a vehicle’s digital twin in real-time represents a significant new vector in the “physical-layer” attack surface. To maintain the long-term integrity of the autonomous supply chain, our security strategies must evolve beyond digital firewalls to include resilient, multi-modal defenses that can verify the physical truth of the spectrum these fleets inhabit.